Results for ""
Robotics 4 Min Read Dec 07, 2023
AI Insights - An innovative controller for real-time object reorientation in robotics

Scientists have created a controller for object reorientation that can use just one depth camera to change the position of various kinds of objects quickly. This invention aims to tackle the problem of creating a flexible and effective system for manipulating things. The system should be able to adapt to different settings and handle objects even when their critical points are not consistently positioned.
The platform has the potential to go beyond object reorientation and be applied to other complex manipulation tasks. There are chances for additional enhancement that should be explored in future research.
Limitations in object reorientation
Several limitations constrain the existing techniques employed in object reorientation research. These include a narrow focus on certain items, limited scope and sluggish manipulation, dependence on expensive sensors, and the production of solely simulated outcomes. These solutions must efficiently tackle the difficulties of transitioning from simulation to real-world situations. Success rates are commonly assessed based on error thresholds, which might vary depending on the specific activity. The student vision policy network has undergone training to target these restrictions specifically and has exhibited minor discrepancies in performance when applied to different datasets.
Robotic hands
This work introduces a technique to improve the agility of robotic hands by tackling the difficulty of rotating objects while they are being held. Previous methodologies have enforced restrictions and necessitated costly sensors, restricting their adaptability. Hence, a controller was trained using reinforcement learning in a virtual setting and demonstrated to be able to use the knowledge it had learned to create new forms in the actual world. The discussion also encompassed the difficulties of training controllers using visual inputs and attaining successful simulation-to-real-world transfer.
Training
The suggested approach entails employing reinforcement learning to train a controller that uses visual input to reorient objects. This training is done in a simulated environment, and the resulting controller is then directly applied in the real world without any additional training. The training employs a convolutional network with increased capability and a gated recurrent unit in a compact setup using the Isaac Gym physics simulator. The reward function integrates both success criteria and supplementary shaping terms. Hence, experiments are carried out on both 3D-printed products and real-world objects. The simulation and real-world outcomes are then compared, considering the distribution of errors and the success rates that fall within predetermined criteria.
Evaluation
The controller, which underwent simulation training, effectively reoriented 150 items when applied to three-fingered and modified four-fingered D'Claw manipulators in real-world scenarios. Achieving real-time performance at a frequency of 12 Hz was possible by utilizing a conventional workstation.
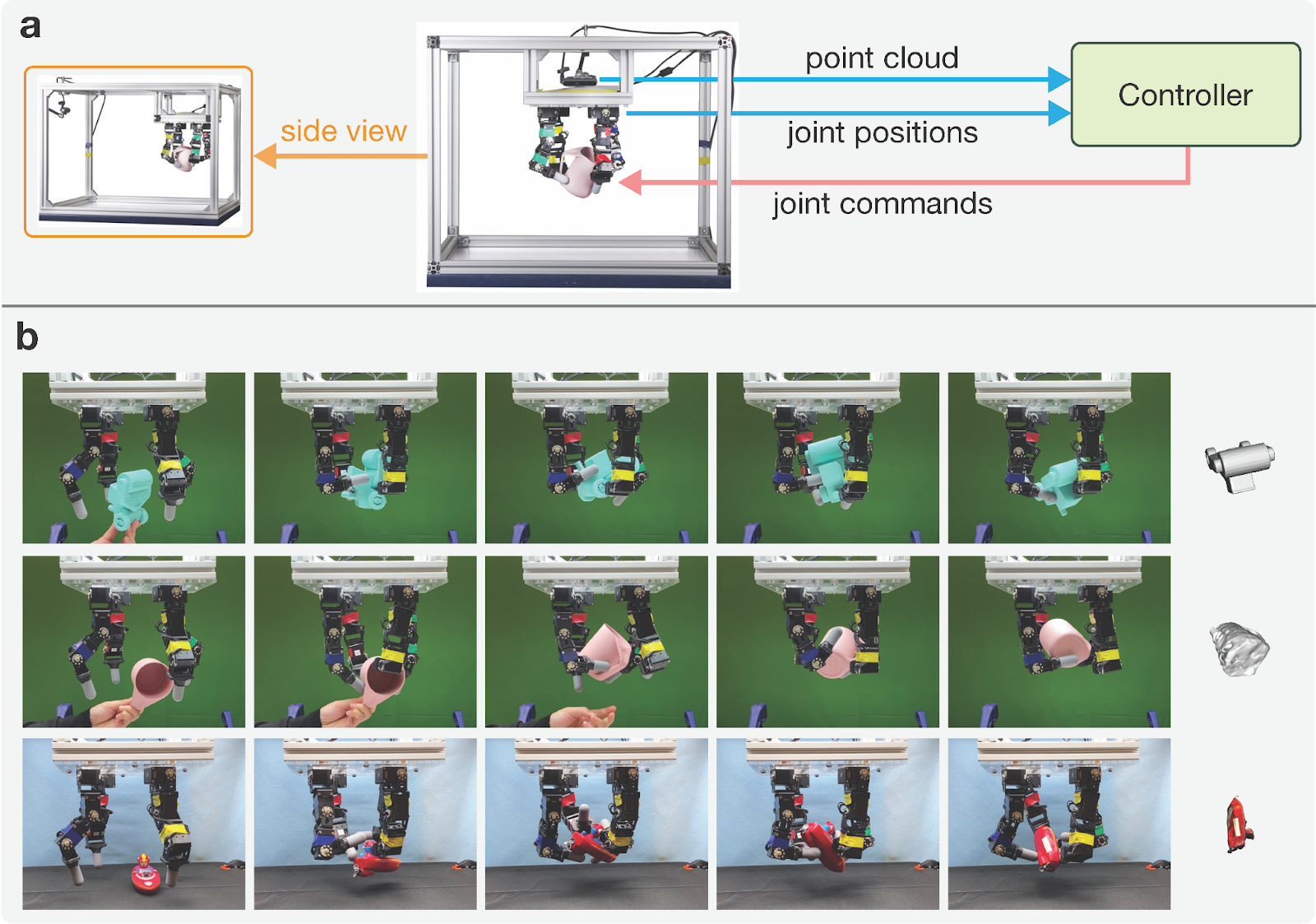
Image source: Visual Dexterit
The assessment, conducted using an OptiTrack motion capture system, demonstrated the precise reorientation of objects and the capacity to apply this skill to unfamiliar item forms. Error distribution and success rates under specific thresholds revealed that the system effectively deals with the challenges of transferring simulations to real-world scenarios. It also can improve precision without making any extra assumptions.
Conclusion
This study emphasizes the difficulties of translating simulation outcomes into real-world applications. Notwithstanding these difficulties, the controller shows promise for use in skilled manipulation of objects held in the hand, especially in less organized settings, and highlights the importance of enhancing precision without making extra assumptions.
One possible direction for future research is to investigate the impact of integrating shape characteristics on the effectiveness of a controller, specifically in terms of accurate manipulation and adaptability to novel shapes. Furthermore, exploring the utilization of visual inputs for training could overcome the constraints of present reinforcement learning controllers that depend on simulating full-state information.
Sources of Article
Image source: Unsplash




